Cleaning Robot
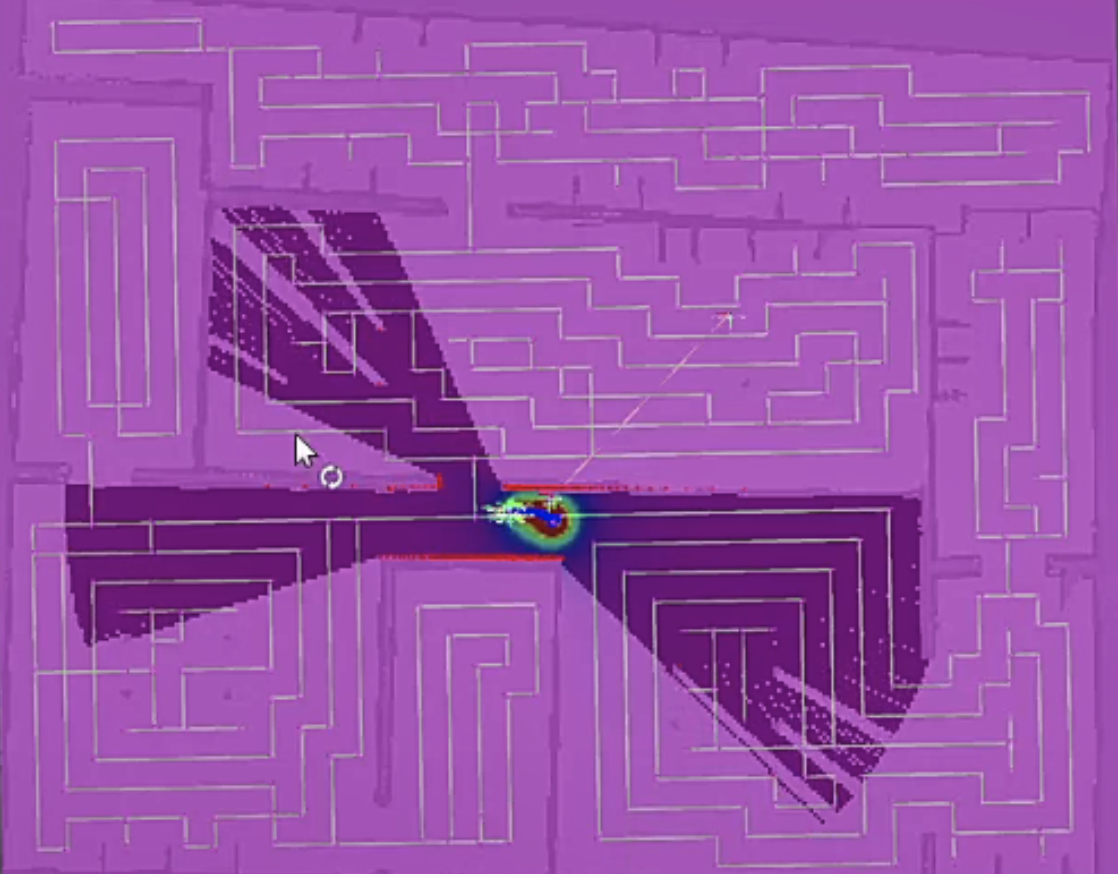
The objective of this project was to develop an autonomous mobile robot, which would drive about an unknown territory and disinfect the area with a simulated UV-light. We had a physical robot to play with, but most of the implementation and testing was done in a simulated environment (Gazebo and RVIZ).
The robot, named Potet, had to solve multiple partial tasks in order to become autonomous. The tasks included creating a map of the environment and positioning in the map, reaching a set of goals contained in a text-file, and path planning for the UV-covering of the environment. For mapping and positioning we used a SLAM algorithm package from ROS called “gmapping”, and another package for exploration called “explore lite”. For the main part of the task, namely the path planning, we used a Full Coverage Path Planning (FCPP) algorithm, with a path following controller to track the moving goal.
The project was performed in a team of 2 people, and it was the final project in the class “Autonomous and Mobile Robotics” at the University of Bologna, and we obtained the highest grade of “30 con Lode”. The ROS modules was written in C++, and the robot we used was a “TurtleBot3 burger” variant. If you're interested, you can have a closer look at the implementation details here.